

 联系我们
联系我们
宏指令,是将通过几个程序指令记述的程序作为1个指令来记录而调用并执行该指令的功能。
二、发那科机器人宏指令具有如下功能:
可在程序中对宏指令进行示教而作为程序指令启动。
可从示教操作盘的手动操作画面启动宏指令。
可通过示教操作盘的用户键来启动宏指令。
可通操作面板的用户按钮来启动宏指令。
(操作箱上没有用户键而不能使用。)
可通过DI、RI、UI来启动宏指令。
将现有的程序作为宏指令予以记录。宏指令总共可以记录2 0个。使用宏指令
时,按如下步骤进行:
1通过宏指令来创建一一个要执行的程序。
2将所创建的宏程序作为宏指令予以记录。此外,分配用来调用宏指令的方法。
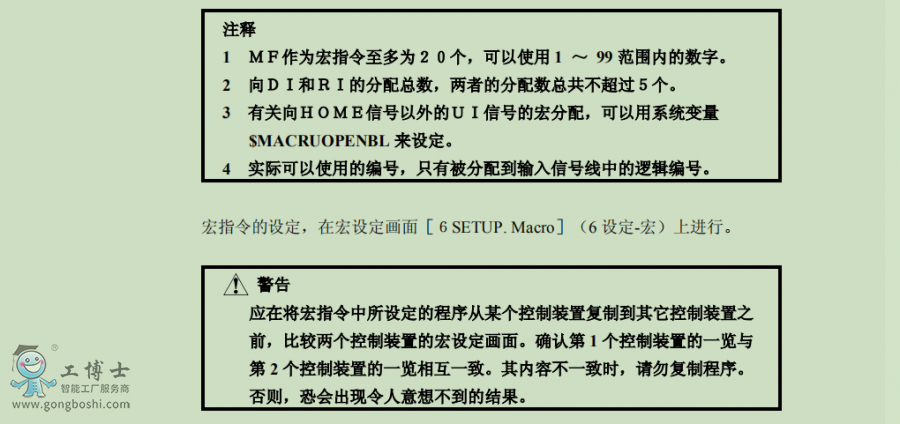
3执行宏指令。宏指令的设定,在宏设定画面[ 6 SETUP. Macro] (6 设定-宏)上进行。

三、宏程序
宏程序是通过宏指令而被启动的程序。宏程序的示教和再现(作为程序再现的情形),可与通常的程序相同方式进行,但是受到如下制约。宏程序,在作为宏程序被记录时,子类型被更改为宏。取消记录时,返回原先的子类型(有关子类型,见4.1.3 小节)。宏画面上记录的宏程序,不能删除。不包含动作(组)的程序,即使没有处在动作允许状态(即使发生报警)也可以启动(有关运动组,见4.1.4小节) 。成组屏蔽的设定,在程序详细画面上进行(见5.3.1 小节)。不伴随动作的宏指令,应尽量在不包含动作组的程序中创建。否则,在机器人动作中也可启动宏指令。
四、向设备的分配
向设备的分配,确定可以从哪个装置来调用宏指令。要分配的设备包括如下:示教操作盘的手动操作画面示教操作盘的用户键操作面板的用户按钮和其他按钮(操作箱上不予提供)DI、RI、 UI。
注释
1MF作为宏指令至多为20个,可以使用1~99范围内的数字。
2向D I和R I的分配总数,两者的分配数总共不超过5个。
3有关向H 0 M E信号以外的U I信号的宏分配,可以用系统变量SMACRUOPENBL来设定。
4实际可以使用的编号,只有被分配到输入信号线中的逻辑编号。
更多产品信息,请点击关注:发那科机器人配件
- 下一篇:详解发那科机器人报警信息!!
- 上一篇:详解发那科机器人从文件画面加载文件