

 联系我们
联系我们
所谓码垛,是指这样一一种功能,它只要对几个具有代表性的点进行示教,即可从下层到上层按照顺序堆叠工件。
1通过对堆叠点的代表点进行示教,即可简单创建堆叠模式。
2通过对路径点(趋近点、回退点)进行示教,即可创建路径模式。
3通过设定多个路径模式,即可进行多种多样模式的码垛。
二、发那科机器人码垛的结构
码垛由以下2种模式构成。
堆叠模式
确定工件的堆叠方法。
路径模式
确定堆叠工件时的路径。
三、发那科机器人码垛的种类
码垛根据此堆叠模式和路径模式的设定方法差异,具有4种(见10.3节)。
码垛B和码垛BX
码垛E和码垛EX
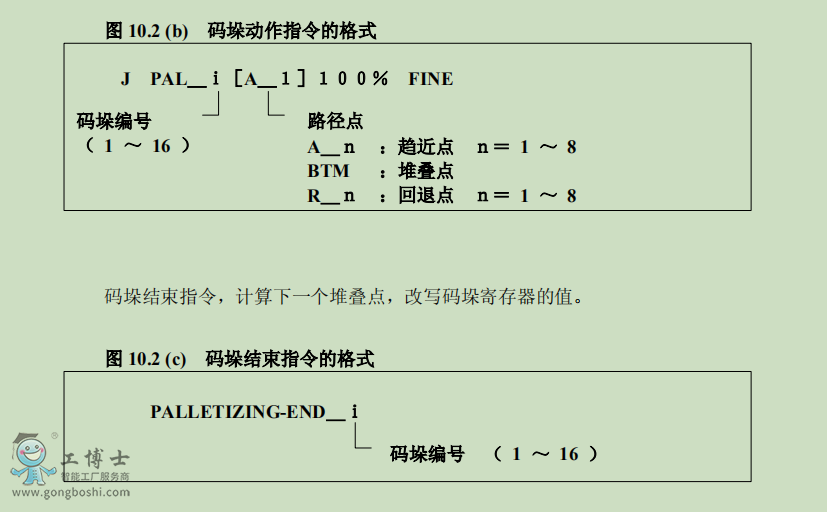
四、发那科机器人码垛指令
基于堆叠模式、路径模式和码垛寄存器的值,计算当前的路径,并改写码垛动作指令的位置数据。码垛动作指令这是具有趋近点、堆叠点和回退点位置数据的码垛专用的动作指令。码垛结束指令使得码垛寄存器的值增减。码垛指令基于码垛寄存器的值,根据堆叠模式计算当前的堆叠点位置,并根据路径模式计算当前的路径,改写码垛动作指令的位置数据。码垛动作指令,是以使用具有趋近点、堆叠点、回退点的路径点作为位置数据的动作指令,是码垛专用的动作指令。该位置数据通过码垛指令每次都被改写。
五、发那科机器人码垛编号
码垛编号,在示教完码垛的数据后,随同指令(码垛指令、码垛动作指令、码垛结束指令) -起被自动写入。此外,在对新的码垛进行示教时,码垛编号将被自动更新。
更多产品信息,请点击关注:发那科机器人配件