

 联系我们
联系我们
1. TP的作用
1)点动机器人
2)编写机器人程序
3)试运行程序
4)生产运行
5)查阅机器人的状态(I/0 设置,位置,焊接电流)
2.认识TP.上的键(见下图)
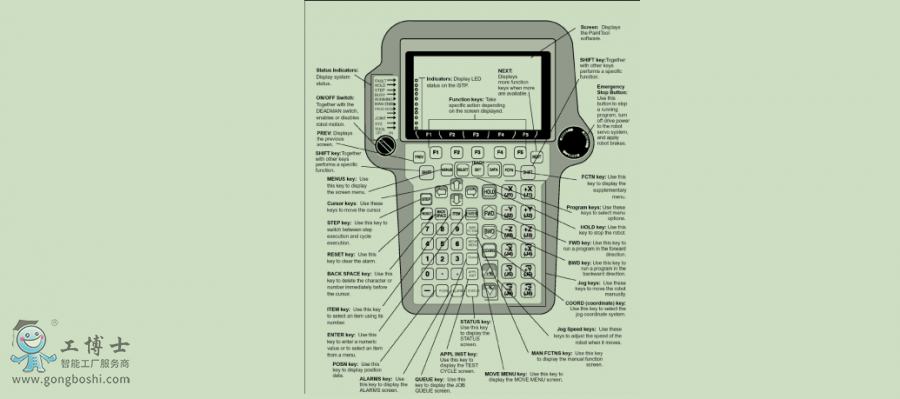
Status Inicators (状态指示灯):指示系统状态。
ON/OFF Switch (开关):与DEADMAN开关一起启动或禁止机器人运动。
PREV:显示上- -屏幕。
SHIFT key (键):与其它键一起执行特定功能。
MENUS key (键):使用该键显示屏幕菜单。
Cursor keys (光标键):使用这些键移动光标。
STEP key (键):使用这个键在单步执行和循环执行之间切换。
RESET key (键):使用这个键清除告警。
BACK SPACE key (键)::使用这个键清楚光标之前的字符或者数字。
ITEM key (键):使用这个键选择它所代表的项。
ENTER key (键):使用该键输入数值或从菜单选择某个项。
POSN key (键): 使用该键显示位置数据。
AL ARMS key (键): 使用该键显示告警屏幕。
QUEUE key (键):使用该键显示任务队列屏幕。
APPL INST key (键):使用该键显示测试循环屏幕。
SATUS key (键):使用该键显示状态屏幕。
MOVE MENU key (键):使用该键来显示运动菜单屏幕。
MAN FCTNS key (键):使用该键来显示手动功能屏幕。
Jog Speed keys (键):使用这些键来调节机器人的手动操作速度。
COORD key (坐标系键):使用该键来选择手动操作坐标系。
Jog keys (键): 使用这些键来手动手动操作机器人。
BWD key (键):使用该键从后向前地运行程序。
FWD key (键):使用该键从前至后地运行程序。
HOLD key (键):使用该键停止机器人。
Program keys (程序键):使用这些键选择菜单项。
二、发那科机器人远端控制器
远端控制器是和机器人控制器相连的外围设备,用来设置系统,包括以下形式:
1)用户控制面板
2)可编程控制器(PLC)
3)主控计算机(Host Computer)
四.显示器和键盘
外接的.显示器和键盘通过RS-232C与控制器相连,可以执行几乎所有的TP功能。
和机器人操作相关的功能只能通脱TP实现。
五.发那科机器人通讯
1)一个标准的RS-232C接口 (外部),两个可选的RS-232C接口(内部)
2)一个标准的RJ45网络接口
六输入/输出I/O
输入/输出信号包括以下:
1)外部输入/输出UI/UO
2)操作者面板输入/输出SI/SO
3)机器人输入/输出RI/RO
4)数字输入/输出DI/DO (512/512)
5)组输入/输出GI/GO (0 to 32767*多16位)
6)模拟输入/输出AI/AO (0 to 16383 15位数字植)
输入/输出设备有以下3种类型:
1) Model A
2) Model B
3) Process I/O PC板
其中Process I/O板可使用的信号线数*多,*多是512个。
更多产品信息,请点击关注:发那科机器人配件
- 下一篇:详解发那科机器人注意事项
- 上一篇:发那科机器人配件——发那科机器人码垛的示教